Overview
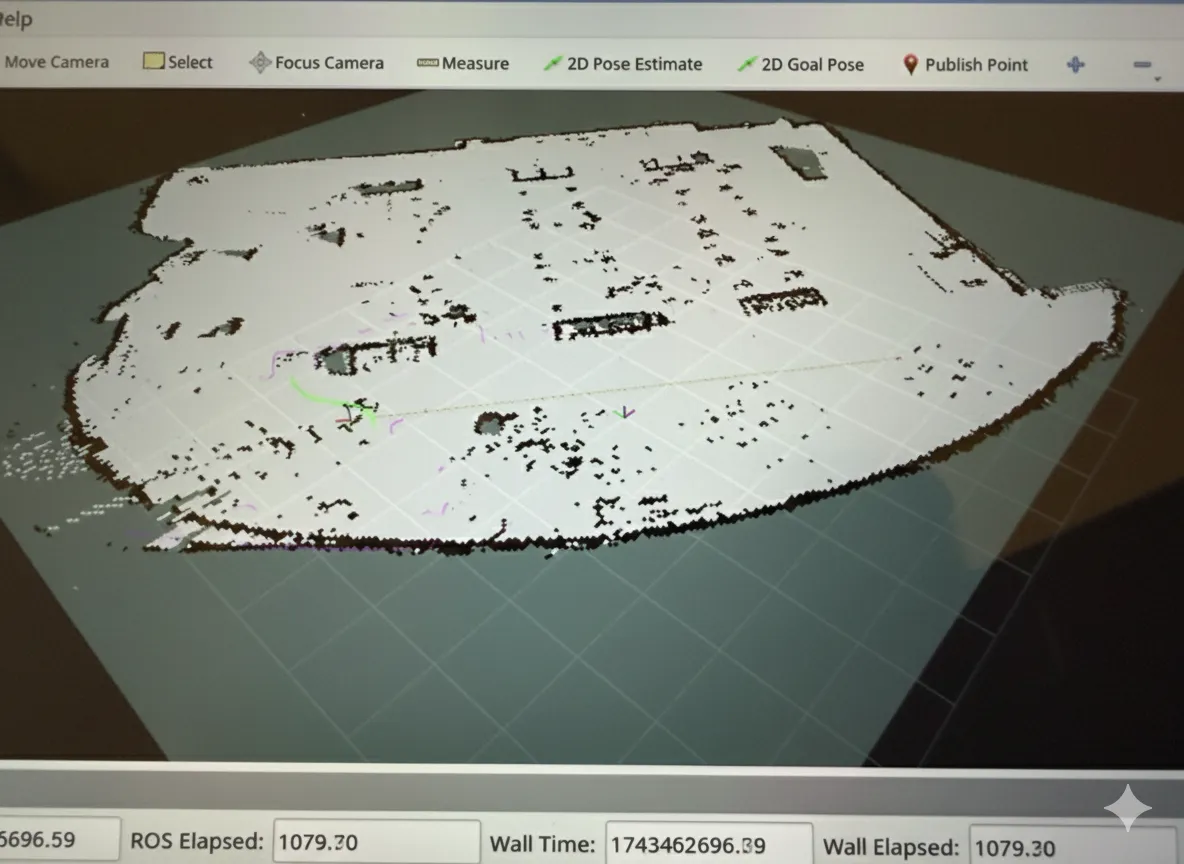
As my course project for MREN203 (Robotics II), I used ROS2 to implement autonomous navigation on a wheeled mobile robot in an unknown environment. The tech stack consisted of custom code to interface with sensors and perform odometry, using the slam_toolbox and Nav2 libraries for navigation and control. The final demo of the project consisted of functional point-to-point navigation in an unknown environment, where the robot could be given a position command in RVIZ outside of the mapped area and navigate there successfully.